
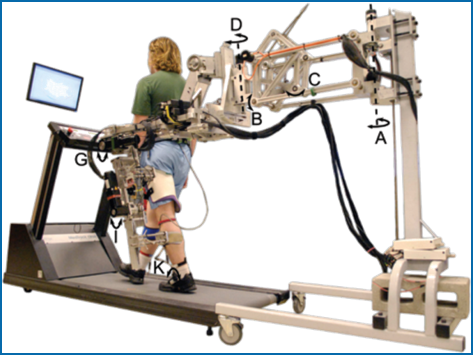
C-ALEX, a cable-driven unilateral leg exoskeleton designed for gait

Design of a cable-driven active leg exoskeleton (C-ALEX) and gait training experiments with human subjects
ALEX Roar Lab

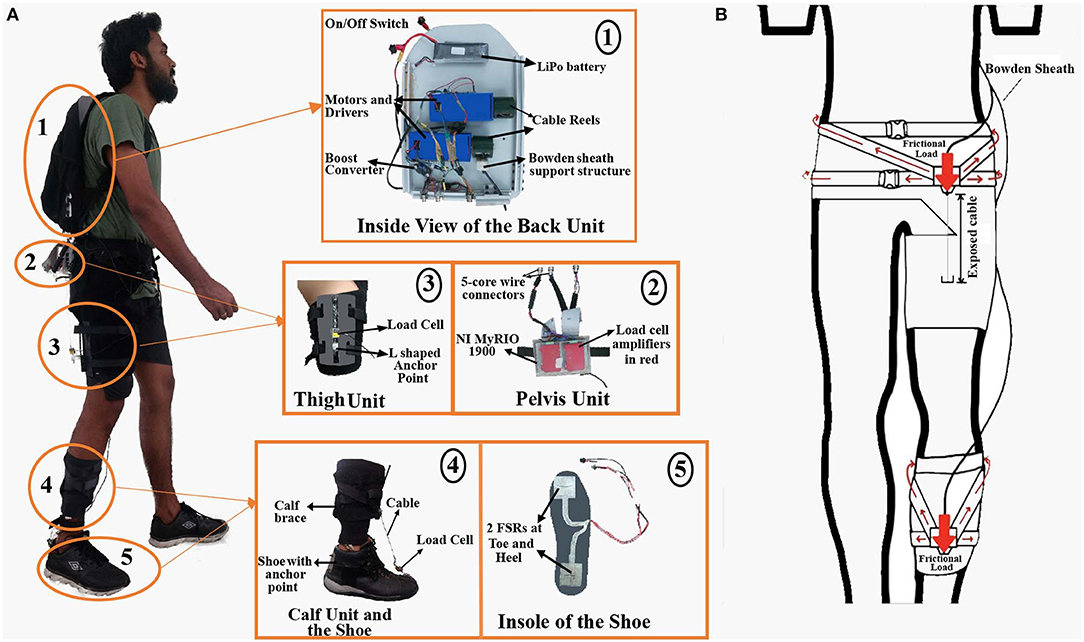
PDF) Driving Robotic Exoskeletons Using Cable-Based Transmissions: A Qualitative Analysis and Overview

Figure 1 from Active Leg Exoskeleton (ALEX) for Gait Rehabilitation of Motor-Impaired Patients

Frontiers User-centered design and development of TWIN-Acta: A novel control suite of the TWIN lower limb exoskeleton for the rehabilitation of persons post-stroke

Example with push-pull cable based actuation: 2 DOF shoulder

PDF) Driving Robotic Exoskeletons Using Cable-Based Transmissions: A Qualitative Analysis and Overview
Frontiers Evolving Toward Subject-Specific Gait Rehabilitation Through Single-Joint Resistive Force Interventions

Sensors, Free Full-Text
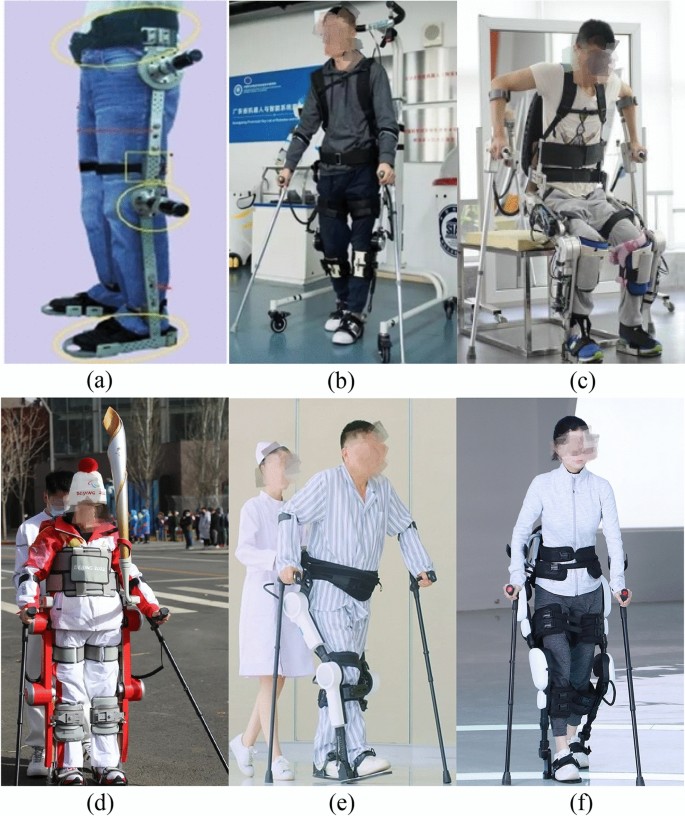
Systematic Review on Wearable Lower Extremity Robotic Exoskeletons for Assisted Locomotion

Comparing the Performance of a Cable-Driven Active Leg Exoskeleton (C-ALEX) Over-Ground and on a Treadmill







